NTT東や三菱ケミカルなど6社、IOWN活用で設備点検の高度化を実証
2026年6月3日 10時23分更新

NTT東日本株式会社、NTTドコモビジネス株式会社、NTTドコモソリューションズ株式会社、株式会社NTTデータグループ、1FINITY株式会社、および三菱ケミカル株式会社は2026年6月1日に、フィジカルAI技術、次世代ネットワークであるIOWN APN、および60GHz帯無線LANを掛け合わせたコンビナート設備点検の高度化に関する実証実験を国内で初めて実施したと発表した。大規模な工場設備が集積するコンビナートの安全・安定稼働を維持するためには、設備の定期的な屋外点検が不可欠であるものの、施設規模が大きい場合には点検作業に多くの工数を要し、現場作業員の負担軽減が長年の課題となっていた。こうした背景から、各社は持続可能な社会の実現に向けた取り組みの一環として、IOWN Global Forumの活動に参画し、ロボットを遠隔操作して設備点検を代行するリファレンス実装モデルの開発を段階的に進めてきた。2024年には工場点検のモデル実証実験をすでに行っているほか、2026年2月には大容量・低遅延な通信環境の検証に成功しており、今回はこの高度な通信環境を用いて、自律型ロボットやデジタルツインなどのフィジカルAI技術を活用した屋外設備点検の実用化を見据えた検証に踏み切った。
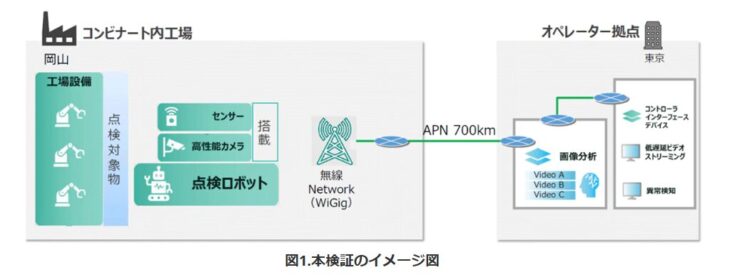

この検証において各社は、三菱ケミカル岡山事業所からNTTグループ東京都内ビルにいたる約700kmという長距離間に「docomo business APN Plus powered by IOWN」を活用した大容量・低遅延なIOWN APN環境を構築した。同時に岡山事業所の構内には、IEEE 802.11ad規格に基づいた60GHz帯を用いる高速無線LAN(WiGig)のアクセスポイントを複数配置し、約150m×150mのエリアで広域無線通信網を整えた。この環境下では、端末主導動的サイトダイバーシティ制御技術を採用したことにより、WiGig装置を搭載したロボットがエリア外周を移動する際にも、最適なアクセスポイントを無瞬断で瞬時に切り替える安定した通信環境を実現した。この通信環境下で実施された走行検証では、東京都内のビルにいるオペレーターが岡山事業所にある四足歩行ロボットの遠隔操作を行い、人間の補助を受けることなく150m×150mの外周を一周することに成功した。さらに、万が一通信が遮断された場合にロボットが安全に停止する制御機能や、ロボットが搭載するセンサーのみで地図を生成して自己位置を見失わずに自律走行する性能、および障害物を認識して自律的に回避する高度な走行技術を確認した。四輪駆動ロボットについても同様の自律走行が可能であることを証明し、ロボットが走行中に撮影した高精細なストリーミング映像データの伝送遅延時間は、目標であった500ms以内を確実に達成した。
また、自律型ロボットに搭載した非接触のカメラとマイクから得られた映像データおよび音響データを、リアルタイムにAIで解析する異常検知の検証も行われた。今回は水撃音などの異音が発生しているポンプ機と配管を対象にデータを収集し、これをAIで解析した結果、普段とは異なる何らかの予兆や異常の発生を正確に検知することに成功した。このAI解析による検知結果は、対象の配管にあらかじめ取り付けられていた固定型センサーからの実測数値と目立った差がなく、ロボット巡回による点検であっても現場の異常を判断するのに十分な高い精度が得られることを証明した。加えて、自律型四輪駆動ロボットを外周させて作成した3D空間マップを基礎とし、遠隔地にデジタルツイン環境を構築する検証も重ねた。ロボットから送信された高精細なストリーミング映像データを画像認識AIで解析してデジタルツインへ反映する一連の処理は500ms以下で処理され、映像伝送におけるパケット損失も0.1%以下という極めて高い安定性を記録した。これにより、コンクリートのひび割れ情報がデジタルツイン環境に即座に可視化され、将来的に進展する可能性のある微細なひび割れまで遠隔地から検出・確認できるシステムとしての実用性を示した。 これらの技術は、点検人員の拠点集約や複数拠点における点検業務の並行実施を可能とし、これからの産業インフラやスマートメンテナンスにおける現場作業員の負担軽減と安全性の向上を大きく推進する画期的な成果だ。 参考


